
Centre for Deep Sea Research (© Mauro Passarella)
The Aegir6000
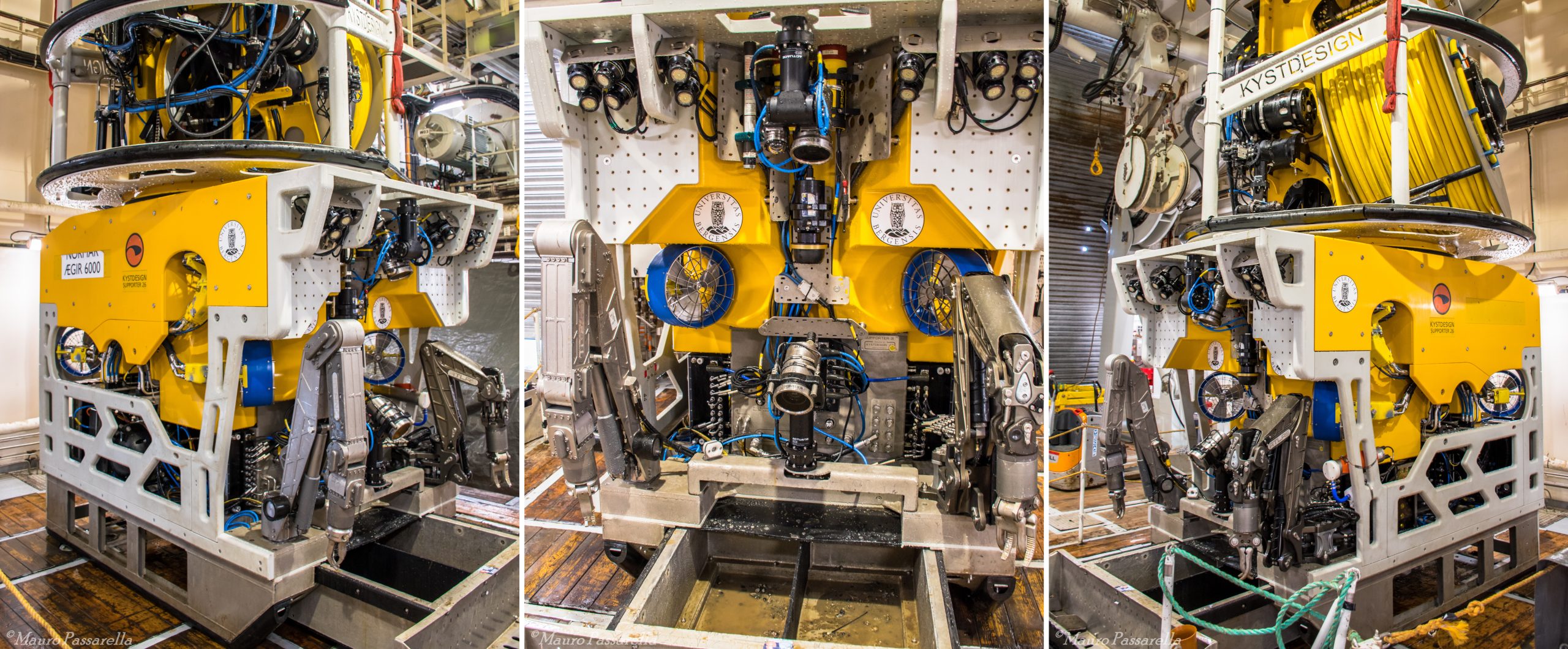
The Ægir6000 (entry photo) is the first Norwegian Remotely Operated Vehicle (ROV) to have been specifically designed as a research ROV. It can dive to 6000m and is capable of carrying and deploying a variety of sensory equipment and numerous cameras, which included also a 4K one. It can also be deployed with a dedicated Tether Management System (TMS) (yellow cable in the entry photo) that stores and deploys the tethering cable when the ROV is submerged enabling it to be decoupled from the motion of the ship and also enabling it to operate at a larger radius from the mother ship. The TMS has a cage-like containment system for transporting the ROV during deployment and has sample storage facilities so that the ROV is capable of collecting more material every dive then previous ROV systems. Ægir6000 is the primary tool for exploring, sampling, and deploying instruments and experiments at deep sea study areas – including the ice-covered parts of the Arctic Ocean. It was funded through a Research Council of Norway (RCN) large infrastructure grant. It was officially launched 1st July 2015. This ROV is a work-class robot specially equipped for science with samplers and sensors sufficiently powered to operate seafloor drilling systems and to install and maintain seafloor observatories – designed for operation from both RV Kronprins Haakon and the RV G.O. Sars [1].
Immersion and Emersion Procedure of the ROV
The ROV can be launched and recovered at the stern of both vessels. However, the immersion and emersion procedure occur differently in the two ships. On board of the Kronprins Haakon the ROV is controlled directly from the internal hangar in which has been built a pool with openable roof. The presence of this pool speeds up operations as well as being of enormous importance when the ship is crossing the icy sea. In this case, in fact, the ship breaks the ice from the bow providing an area of the sea without ice at the stern, allowing the immersion and emersion of the robot (video 1). This means that for scientific expeditions close to Greenland and at North Pole, only the Kronprins Haakon is able to guarantee the operations with ROV. While, on board of the G.O. Sars, the robot needs to be connected to a sturdy pulley that can carry it overboard from one side of the ship and bring it back on board once the operations have been completed (video 2). This procedure is much slower with respect to the Kronprins Haakon as it requires more time to check properly the pulley and functionality of cables as well as a more careful maintenance of all systems.
Video 1. Immersion and emersion procedure of the Ægir6000 from the RV Kronprins Haakon. Research cruise at Molloy Deep (© Mauro Passarella)
Video 2. Immersion and emersion procedure of the Ægir6000 from the RV G.O. Sars. Research cruise at Mohns Ridge (© Mauro Passarella)
The Importance of the environments at deep-sea
As I’ve already mentioned in one of my previous posts, in oceanic environment, a ridge forms exactly where two tectonic plates move away of each other, allowing molten rocks rise-up from the mantle. At the same, new oceanic crust (of basaltic composition) generates. These points, despite of difficult access for humans, have been of particular interest for many scientists since decades. This is due to the still not well known geology formation and composition as well as for the presence of possible active hydrothermal fields (hot fluids), and their exceptional associated ecosystem. In this regard, the Ægir6000 becomes an extraordinary “travel companion” during scientific expeditions due to its capacity to access places and depths into the ocean that the human being cannot reach because of the extreme environmental conditions. For example, for petrologists it’s of big importance to reach the bed-rock at ocean floor for the study of its mineralogical composition; for geochemists and chemists the possibility to arrive close to an active hydrothermal vents is important to study both the fluid composition (organic and inorganic) and the consequent mineral deposits formation (e.g., Seafloor Massive Sulfide (SMS) deposits of economic interest with the presence of copper, lead, zinc, cobalt, manganese); while for geobiologists the study of the chemical proprieties (e.g., oxic/anoxic conditions) of collected sediments gives access to the comprehension of fundamental mechanisms that regulate the life of many animal species, and especially the activity of the oldest organisms of our planet such as archaea, bacteria, and algal.
Rocks sampling procedure and a quick look at one active hydrothermal field
During the two scientific expeditions which I had the chance to participate in (at Molly Deep and Mohns Ridge), I saw the Ægir6000 in operation, both times. The main goals were to test the ROV at different depths (e.g., over 5000m at Molloy Deep), collecting rock samples from the ocean floor (video 3) and looking at the presence of active hydrothermal fields (video 4). For collecting rocks, the Ægir6000 can use directly his robotic arm equipped with a hand-hook, or with a hydraulic saw in case is necessary to cut a specific part of the outcrop. At this point, when the ROV is collecting the rock samples, some people of the research team are well organized in writing down on laptop all information about each dive: number of rocks sampled, coordinates of the place where the rock is collected, time, and position where the robotic arm disposes the sample into the metal container. This is very important for not confusing rocks. At the same, other people stay in the main controlling room where pilots drive the robot. Finally, once the Ægir6000 is back to the surface, other member of the research group are in charged to take and carefully arrange the rock samples in the laboratory on board (video 5).
Video 3. Rocks sampling procedure of the Ægir6000 at deep-sea using both the robotic arm with hand-hook and with the hydraulic saw. Research cruise at Mohns Ridge (© Mauro Passarella)
Video 4. Hydrothermal vent (Perle & Bruse) with its associated ecosystem, filmed by the Ægir6000 at deep-sea. Research cruise at Mohns Ridge (© Mauro Passarella)
Video 5. Arrangements of the rock samples after the emersion procedure of the Ægir6000 on board of the G.O. Sars. Research cruise at Mohns Ridge (© Mauro Passarella)
The ROV Pilots
The ROV is as much important as the pilots that control it. In every cruise expedition there are three or six pilots. This depends how long the robot needs to be used. For example, if the ROV is planned to use for half day (12 hours) three pilots are enough, while if it’s decided to control the robot 24 hours a day, six pilots are necessary. Obviously, the use of the Ægir6000 is decided during the organization of the cruise (before to get on board), and then the pilots are contacted for the job. During every dive of the ROV, three pilots work together. Two of them take position on a “gaming chair” in front of a wall entirely covered by monitors showing data and landscapes around the robot (Fig. 1a-d). The third pilot, instead, moves in the room for any kind of support. Each pilot’s station is composed by joysticks and several buttons. One of the two pilots operating the Ægir6000 controls the navigation system, while the other controls the movement of the robotic arms. The commands are transmitted to the robot along smaller fiber optic cables passing into the main bigger wire used to submerge/retract the ROV, and through the TMS. The pilots are also very important because they are in charge for the correct functionality of the ROV. They have to check and fix any mechanical and software problem (Fig. 1e,f). The pilots have two years of training before getting the license to operate the Ægir6000.

(Research cruise at Mohns Ridge) (© Mauro Passarella)
Be First to Comment